システムの構成
Roomba Hackにおける
計算機やDockerコンテナのシステム構成について説明します。
各回の演習でRoombaのセットアップ時に実行するコマンドの意味(目的)を大まかに理解し、
プログラムを実行したい時にどのDockerコンテナに入るべきかがわかるようになる
ことを目指します。
Lecture
はじめにシステム構成を説明した後、 node同士の通信を可能にするros masterの機能について説明し、 最後に各回の講義で実行するコマンドの意味を説明します。
システム構成
以下の図が、システムの完成形を表しています。
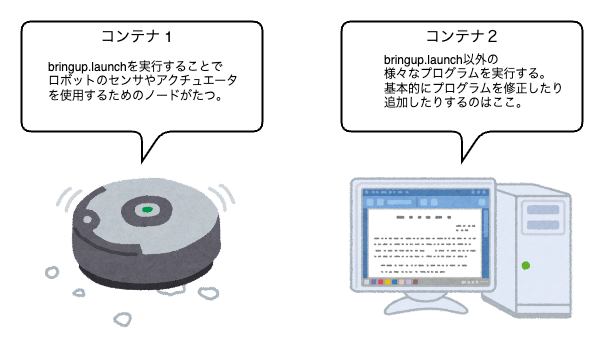
Roombaに載っているJetsonと開発PCのそれぞれで、Dockerコンテナが1つづつ起動しています。 便宜的にコンテナ1、コンテナ2と呼びます。
Jetson側では、Roombaのセンサやアクチュエータ(モータなど、 動力を生み出すもの)を制御するためのノードが動作します。 比較的低レイヤーの動作を担っています。
開発PC側で動作するノードは、Jetson側のノードと比べて高レイヤーの機能を担っています。 開発PCはJetsonと比べスペックが高く、計算量の大きい処理も行うことができます。 各回の演習で編集するソースコードは、開発PC側のDockerコンテナ内で動作するものです。
ros masterとROS_MASTER_URIの役割
ROS講座20 複数のPCでROS接続1を参照してください。
コマンドの意味
コンテナ1内のノードとコンテナ2内のノードがデータをやり取りするためには、 同じros masterに問い合わせを行う必要があります。
Jetson側で実行するコマンド
各回の演習では、 初めにJetsonにssh接続して
~/group_x/roomba_hack$ ./RUN-DOCKER-CONTAINER.sh
を実行することでコンテナ1を起動し、 そのままコンテナ1内で
~/group_x/roomba_hack$ roslaunch roomba_bringup bringup.launch
を実行した時点で、すでにros masterが起動しています。
開発PC側で実行するコマンド
つぎに、開発PCで
$ ./RUN-DOCKER-CONTAINER.sh 192.168.10.7x
とすることで、コンテナ2を起動しています。 この時、引数にJetsonのIPアドレスを指定することで、 コンテナ1と同じros masterに問い合わせを行っています。
ここまでで、必要な準備は完了しています。
他のプログラムを新たに実行したい場合には、すでに存在しているコンテナ2内で実行してください。
具体的には、開発PCで新しいターミナルを開き、
~/group_x/roomba_hack$ ./RUN-DOCKER-CONTAINER.sh
(すでに開発PC上でコンテナが起動している場合には引数はいらない) を実行することでコンテナ2内に入ることができます。
あるいは、新しいターミナルで
$ docker exec -it roomba_hack bash
を実行しても同じことができます。
その後、rosrunコマンドやroslaunchコマンドで、実行したいプログラムを実行してください。
補足$ ./RUN-DOCKER-CONTAINER.shや$ roslaunch roomba_bringup bringup.launchのより詳細な動作が知りたい場合は、
ファイルの中身を読んで確認してください。